每周文章分享2022.07.18-2022.07.24标题:Optimal Time-Consuming Path Planning for Autonomous Underwater Vehicle 2022-7-23 05:0:57 Author: 网络与安全实验室(查看原文) 阅读量:31 收藏
每周文章分享
2022.07.18-2022.07.24
标题:Optimal Time-Consuming Path Planning for Autonomous Underwater Vehicles Based on a Dynamic Neural Network Model in Ocean Current Environments
期刊:IEEE Transactions on Vehicular Technology, vol. 69, no. 12, pp. 14401-14412, Dec. 2020.
作者:Mingzhi Chen and Daqi Zhu
分享人:河海大学——赖威哲
01
研究背景
BACKGROUND
研究背景
随着科技的进步,自主水下航行器(AUV)已经广泛应用于许多民用和军用领域。AUV通常是无人驾驶的,没有远程控制,因此需要为其规划路径。现有的路径规划算法大多忽略了洋流的影响,使得其模型难以应用于真实的海洋环境。
随着技术的快速发展,已经可以测量洋流强度和方向,并利用数据统计进行预测。然而,在考虑到洋流的路径规划方法中,当洋流强度较大时,存在以下几点问题:容易导致所规划的路径不可达、容易产生错误路径等。并且,有些方法仅限于二维环境下的应用。
02
关键技术
TECHNOLOGY
关键技术
本文基于生物启发式神经网络(BNN)模型的结构,提出了一种新的动态神经网络模型,用来进行路径规划。其中,两个相邻神经元之间的互连接权重是非对称的,并且是各向同性的。神经元仅连接到其感受区中具有最高互神经活动的神经元之一,这被称为“赢者通吃”。
本文使用B样条算法来将规划后的路径进行平滑处理。
03
算法介绍
ALGORITHMS
算法介绍
1. 路径规划任务模型
本文将二维/三维环境划分为一个个小的正方形/正方体网格,并将路径规划分为两个步骤,即规划步骤和后处理步骤。在规划步骤中,为了使AUV从起始位置到达目标位置,规划了一条安全路径,该路径由一系列网格单元组成。然后,使用B样条算法进一步处理路径,形成连续轨迹。网格单元i的坐标为nd_i=(x_i,y_i,z_i),则网格单元i和j之间的欧式距离为|nd_i-nd_j|。AUV以恒定的推力航行,相对于洋流具有恒定的标量速度|v_rc|。对于网格单元i处的洋流速度v_ci,可以通过调整AUV的速度方向来获得直接到达第j个网格单元的速度v_i。因此
那么从网格单元i到j的时间为
路径规划问题的目标是最小化从起点到目的地的总时间消耗
图1 洋流环境中节省时间的路径规划
图1展示了在具有障碍物和洋流的二维环境中规划的最小时间成本路径。箭头表示每个网格单位中的洋流速度。箭头越长的表示洋流速度越大。黑色区域代表障碍物。红色部分显然不是最短的距离,但它使AUV在洋流场的帮助下快速到达目的地。
2. 洋流模型
本文建立了两种不同的洋流模型,即非循环但时变的洋流和静态但复杂的空间涡流。非循环但时变的洋流定义为
在静态但复杂的空间涡流中,网格(x,y)中的洋流速度表示为(u(x,y),v(x,y)),定义如下:
3. 动态神经网络模型
动态神经网络模型的架构类似于BNN模型,在BNN模型中,相邻神经元之间的连接权重是对称的,并且只与神经元的距离有关,这不适合洋流环境。由于洋流单向流动,两个神经元单元之间的连接权重应该是非对称的和各向异性的。权重应该在可以使用有利洋流的方向上增加。
所提出的模型可以描述为
模型的主要思想为:使用一个个神经元与各个网格单元一一对应,通过选择一系列的神经元来形成一条路径。每个神经元被赋予一个神经活性值,假设当前神经元对应于网格单元i,那么神经元j的活性值x_j(t)由神经元i的活性值x_i(t-1)、从网格单元i到j的所需时间t_i以及网格单元j是否为目的地或障碍物所决定。x_j(t)随着x_i(t-1)的增大而增大,随着t_i的增大而减小。若网格单元j为目的地,则增加x_j(t)的值;若网格单元j为障碍物,则减小x_j(t)的值。此外,若从网格单元i到j的方向与洋流速度相反,则将t_i设置为无穷大,表示网格单元j是不可达的。当每次选择下一个神经元时,选择感受野内活性值最大的神经元,从而得到一条路径。
图2 二维动态神经网络架构
如图2所示,对于到达神经元i的活性值,目标神经元s依次将其活性值传播到神经元k、j和i,然而,有时存在非常强但方向相反的电流,目标神经元的活动不能直接传播到其邻近的一些神经元,那么它将通过迂回传播。
图3 动态神经网络模型的拓扑图
图3为模型的拓扑图,这是一个离散的Hopfield神经网络。神经元只连接到最高的突触强度,并记录神经活性值的传播方向。每个神经元的活性值的计算可以并行执行,并保留到达目标位置的时间梯度。
4. B样条算法
B样条算法通过输入所规划的网格单元作为控制顶点来平滑路径,其曲线方程为
nd_i是由神经网络模型规划的网格单元;N_i,a(u)是一个具有a个多项式的基函数;u是一个非减参数,称为结向量。基函数可以从Cox-deBoor递归方程中导出。
本文为B样条算法选择了一个三次基函数来平衡路径跟踪和曲率,这也可以为AUV提供连续的加速度。然而,它仍然可能导致与障碍物相交的不安全路径。幸运的是,B样条是局部可控的,可以很容易地调整以满足无碰撞的要求。为了提高路径的安全性,可以首先将障碍物放大一个网格,以在真实障碍物周围创建虚拟障碍物。其次,本文应用了中点插入法来保持与线段的相似性。如图4所示,中点插入的曲线与线段更相似,从而为AUV提供了更安全的路径。
图4 改善路径的中点插入(红色虚线:没有中点插入的曲线;蓝线:有中点插入的曲线)
04
实验结果
EXPERIMENTS
实验结果
本文分别在二维和三维环境中进行了实验,其中二维环境中的实验包括有效性实验和对比实验。
A. 有效性实验
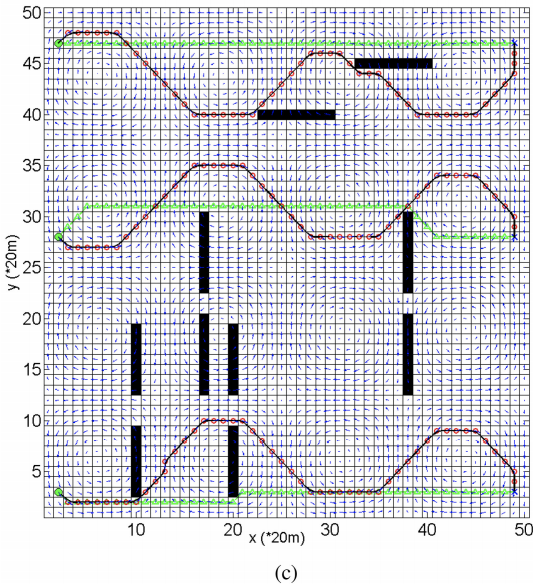
在有效性实验中,使用了本文所建立的两种洋流模型。图5为最短距离算法与所提出的模型在三种不同强度的静态涡流中的结果。黑色区域表示障碍物,绿色圆圈表示初始位置,蓝色的“x”表示目的地。所提出的动态神经网络模型所规划的路径由一系列红色圆圈组成,而最短路径由一系列绿色三角形组成。b样条算法平滑黑线表示的路径。
图5 静态涡流环境中路径规划的结果:(a)弱洋流;(b)中等洋流;(c)强洋流
表1显示了所规划的路径的时间和距离成本。在弱洋流环境中,所提出的模型规划的路径与最短距离算法几乎相同。但是,它也延迟了一些转折点,以减少时间成本。中强洋流中的路径与最短路径有很大的不同,它遵循洋流的方向。在中等洋流和强洋流环境中,虽然所提出的模型的距离成本高于最短路径,但可以减少到达时间。并且,洋流越强,所提出的模型的优势就越显著。
表1 三种不同洋流强度下的时间和距离成本
B. 对比实验
本文首先将所提出的模型与粒子群优化(PSO)算法进行对比,然后将其与人工神经网络进行对比,最后将其与模型预测控制算法进行对比。
1)强洋流环境中PSO算法的结果:PSO算法的结果如图6所示,可以看出,这些路径与动态神经网络模型规划的路径基本相同,只是由于路径点沿x方向单调增加,所以不能充分利用整个强洋流影响,时间成本也更高。
图6 PSO算法在强涡流环境中的路径规划结果
2)与人工神经网络的对比:为了进一步解释动态神经网络模型与人工神经网络的区别,引入人工神经网络(ANN)模型,在无洋流的简单的障碍物环境中与动态神经网络模型进行对比。图7中,蓝线表示ANN的路径,黑线表示动态神经网络模型的路径。ANN的路径距离为1195.1米,而动态神经网络的路径距离为1194.8米。在本文的实验中,ANN需要超过300次的迭代才能形成可行的路径。因此,尽管它也可以规划较短的路径,但它只适合于静态环境。此外,在复杂的障碍物环境中,它有时可能会收敛到局部最小值。
图7 与人工神经网络的对比结果
3)与模型预测控制算法的对比:图8为所提出的方法与模型预测控制算法的对比结果,其中红色区域包含反向洋流,绿色区域包含有利洋流。蓝线是从起点到终点的直线路径,耗时991.3秒。黑线是通过Matlab中的非线性优化函数“fmincon”进行模型预测控制的路径,称为“MPC-fmincon”,它的路径耗时728.5秒。紫红色路径是以遗传算法为优化函数的模型预测控制形成的路径,即“MPC-GA”算法。蓝绿色的虚线是由10个“MPC-fmincon”经过多次初始猜测的路径,称为“MPC-mst”。“MPC-GA”和“MPC-mst”的路径耗时分别为702.2秒和677.1秒。红线是提出的模型规划的路径,耗时674.6秒。与所有模型预测控制算法相比,所提出的模型能以更少的时间成本规划出更好的路径。
图8 与模型预测算法的对比结果
C. 三维环境中的实验
图9 涡流环境中路径规划的可视化
1)涡流环境中的路径规划:在水平面上生成强涡流。使用动态神经网络模型,AUV从绿色圆圈表示的位置开始,到达由蓝色“x”符号表示目的地。规划的路径如图9所示。红色圆圈为动态神经网络模型规划的路径点,红线表示平滑轨迹。AUV利用洋流来节省能量,减少航行时间。规划的路径是安全的,可以避免与海底山脉碰撞。
2)非循环洋流环境下的路径规划:地形情况与涡流环境相同,洋流自西向东流动,强度较强且无环流。AUV从起点开始,使用动态神经网络模型到达目的地。如图10所示,AUV潜入深处,顺着有利洋流的方向移动。
图10 无环流路径规划的可视化
05
总结
CONCLUSION
总结
本文提出了一种新的动态神经网络模型,能够在受洋流影响的水下环境中规划最优的时间-成本路径;应用B样条算法来平滑所规划的路径。在模型中,神经元仅连接到具有最高刺激活性的神经元。与BNN模型不同,互连接权重是不对称的。通过这种局部和不对称的相互作用,目标神经元的活性值将随着时间梯度在环境中广泛传播。神经活性值反映了到达目的地的最小时间成本,而神经元的刺激方向指示了最小时间成本路径。
END
扫描二维码关注我们
==河海大学网络与安全实验室==
微信搜索:Hohai_Network
联系QQ:1084561742
责任编辑:何宇
如有侵权请联系:admin#unsafe.sh