今天给大家推送的是《美国海军的无人作战框架》
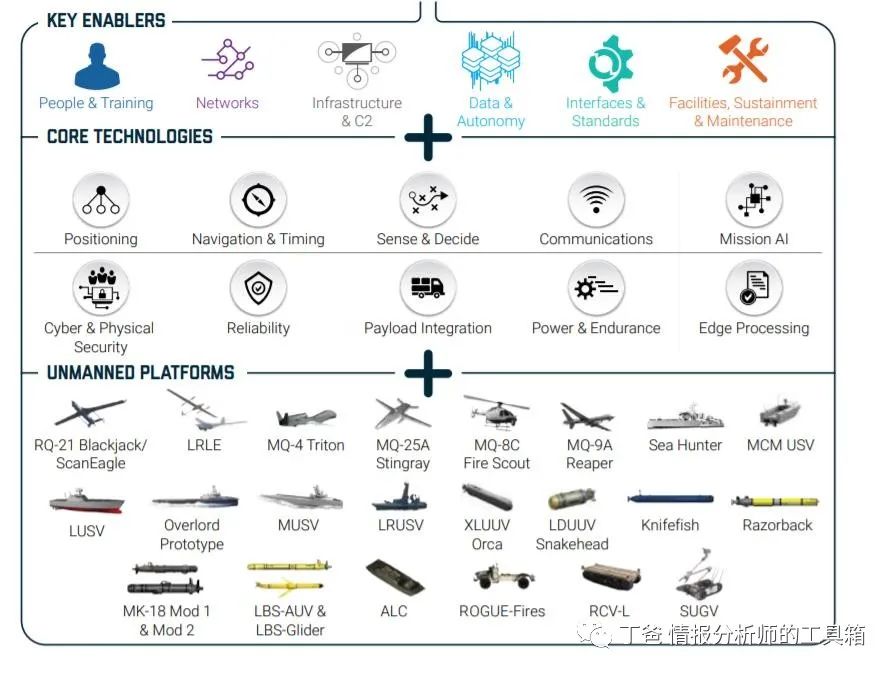
无人系统通过解锁对无人系统的约束来提供实现任务结果的能力。单靠建设这个平台特遣队是无法取得成果的。为了在无人驾驶空间提供全面解决方案,海军部(DON)将更加注重开发成功总结各种投资经验教训所需的促进因素。其中一些关键使能因素包括:网络、控制系统、基础设施、接口、人工智能和数据。海军和海军陆战队正在设计和实施一个全面的作战架构,以支持分布式海上作战(DMO)。这个架构将为部队、战斗群和舰队提供准确、及时、分析的信息。
第一部分任务——为什么要无人驾驶?
介绍
为什么开展这项运动?
执行运动的POA&M
为何要无人驾驶?
与国防战略的衔接
第二部分无人项目-我们现在在哪里?
空中项目
水面项目
海底项目
地面项目
无人机器领域的机遇
第三部分交付未来——我们将如何到达那里?
挑战
建立一个可靠的计划和未来
改变叙事
消除技术发展的风险
提供完整的解决方案
一个全国性的方法
工业和学术界
盟友和伙伴
法律、政策和道德方面的考虑
探索的机会
附录A:无人项目术语表
下面介绍一下无人作战框架涉及的各类无人机、无人车、无人艇及无人潜航器:
MQ-25刺鳐无人机
V-BAT 128无人机系统(UAS)
V-BAT 128无人机系统(UAS)是美国先进航空技术公司Martin UAV制造的V-BAT垂直起降(VTOL)UAS的升级版。与前身相比,新飞机提供了更高的有效载荷能力和续航能力。
2021 年 2 月,这架无人驾驶飞机在美国佐治亚州本宁堡的陆军远征战士实验 (AEWE) 进行了演示。
RQ-20 Puma
RQ-20 Puma是由 AeroVironment 打造的轻型军用无人机。
无人机配备了四个摄像头(两个光学和两个红外)。
长度:1.4 m
翼展:2.8 m
最大起飞重量:5.9 kg
发动机功率:1 hp
最高速度:83 km / h
巡航速度:37 km / h
航程:15 km
飞行时间:2 小时
该飞机于 2007 年首次使用,自 2008 年以来,它一直在为美国陆军、海军陆战队、海军、空军和特种作战部队服役。
远程/长航时 (LR/LE) 无人驾驶飞机系统 (UAS)
波音Insitu RQ-21 Blackjack
RQ-21A Blackjack 旨在通过提供前沿侦察来支持美国海军陆战队。一个RQ-21A Blackjack系统由五个飞行器和两个地面控制系统组成。飞行器可以通过轨道在陆地或船上发射,并使用“天钩”回收系统在陆地上发射,垂直线必须挂在机翼上;在地面上,发射和回收系统可由车辆牵引。它的翼展为 16 英尺(4.9 米),可承载 39 磅(18 千克)的有效载荷。在 8,000 英尺 (2,400 m) 处,日/夜摄像机可以在NIIRS尺度上达到 7 的分辨率等级。
MQ-4C海神侦察机
MQ-4C海神是美国海军正在研制的,由RQ-4全球鹰侦察机发展而来的高空长程无人机。该无人机基于“广域海上监视”项目开展研发,计划生产一款配合P-8波塞冬海上巡逻机,可以进行海上实时监视,情报搜索,反潜侦察,以及搜救等任务的无人飞机。
MQ-8C 火力侦察机
这是一种无人直升机,专为海上情报、监视、侦察和目标定位 (ISR&T) 任务而设计。为了完成这些任务,MQ-8C 配备了更新的有源电子扫描阵列 (AESA) 雷达,使其能够在各种天气条件下检测远距离目标,以及强大的光电和红外传感器球。除了 ISR&T 之外,火力侦察兵已经在多种角色中进行了测试,包括水雷拦截和反潜行动,这些行动显示出未来扩展其核心任务集的希望。
MQ-9收割者侦察机
MQ-9“死神”,又译“收割者”,是通用原子航空系统为美国空军所开发的无人机。MQ-9也是世上第一种专为长时间进行高空侦察任务而设计的武装无人机。前美国空军参谋长麦可·莫斯利曾于2006年表示,美军在伊拉克自由行动之前主要将无人机用于情监侦任务当中,但在获得MQ-9后便大量使用无人机执行攻击任务。
无人驾驶物流系统 - 空中 (ULS-A) 中型升力飞行器
海猎号无人舰 (Sea Hunter)
海猎号,是一艘自主无人船。它是美国国防高等研究计划署的“持续追踪反潜无人舰”计划的一部分,2016年开始执行。海猎号由维格工业建造,2016年4月7日在俄勒冈州波特兰市举行命名下水礼。这艘船承继了一系列美军实验船有“海”字的命名习惯,包括海影号、海斗士号,和海刀锋号等。
反水雷无人水面舰艇(MCM USV)
德事隆系统公司多年来一直与海军合作,帮助海军通过自己的无人系统开发 MCM USV,该系统被称为通用无人水面舰艇。是一种长续航、半自主、柴油动力、全铝水面舰艇,支持使用各种MCM 有效载荷。利用在 ACAT III 无人影响扫描系统 (UISS) 计划下开发的成熟工艺设计,MCM USV 计划采用多个有效载荷交付系统 (PDS),包括扫雷 PDS、猎雷 PDS 和用于未来有效载荷的 PDS,集成到基础MCM USV工艺中。
大型无人水面舰艇 (LUSV)
大型无人水面舰艇 (LUSV)是为美国海军设计的无人水面舰艇,将于 2020 年开始建造。设计为基于商业设计的低成本、高耐久性、可重构舰艇,它们将具备用于模块化有效载荷,例如反舰、反潜或防空武器。
2018 年启动的“幽灵舰队霸王计划”的目标是将大型商用船只改造成自主操作。设计人员安装了感知和自主系统,自动化并提高了扩展任务的船舶系统可靠性,并开发了指挥控制和通信架构。霸王 USV 原型 1 (NOMAD) 和 2 (RANGER) 参加了多次舰队级演习和演示,以自主模式行驶 28,982 海里,并测试了大量有效载荷。
MUSV 将是一种码头发射、自行部署的模块化、开放式架构 (OA) 水面舰艇,能够自主安全导航和执行任务。
LRUSV 系统将开启海军技术的新时代,同时提高美军的杀伤力,其无人驾驶船只网络将自主航行以扩大航程,并运输游荡弹药以应对海上和陆地目标。
这种分层的、可扩展的武器系统将提供准确跟踪和摧毁整个战斗空间范围内目标的能力。虽然完全自主,但这些船只可以选择有人驾驶,它们将携带多个有效载荷,它们将能够自主发射和回收。
该潜水器的导航系统包括卡尔曼滤波惯性导航单元 (INU)、多普勒速度测井仪 (DVL)、深度传感器和海底长基线 (LBL) 转发器。Echo Voyager 还配备了 GPS 以支持其在地面或靠近地面的操作。加密的 Inmarsat IV、Iridium、Wi-Fi 和 FreeWave 通信用于指挥、控制和任务重新规划,同时潜水器执行近地表操作。
潜水器在水下作业期间使用声学通信进行指挥和控制。
Orca 预计将配备前视声纳 (FLS) 和自主避障算法,以避开障碍物。FLS 和 DVL 促进了海床的地形跟踪能力。
模块化有效载荷舱将能够容纳 8 吨干重,舱由 18kW 电池供电。它还将容纳外部有效载荷。有效载荷舱将具有支持现有和未来有效载荷要求的接口。该潜水器将能够携带声纳有效载荷,包括用于改进海底测绘的雷神 PROSAS PS60-6000 合成孔径声纳。
Orca XLUUV 将以 2.5k 的最低速度和 8k 的最高速度巡航。潜水器的最佳速度将在 2.5k 到 3k 的范围内。它将提供近 6,500nm 的工作范围。
当车载锂离子电池几乎耗尽时,潜水器将升起桅杆浮出水面并启动柴油发电机。
Snakehead 大排量无人水下航行器 (LDUUV)
Snakehead 是一种模块化、可重新配置、多任务LDUUV ,可从潜艇和水面舰艇部署,提供制导和控制、导航、态势感知、推进、机动和传感器,以支持 IPOE 任务。Snakehead 在船体材料、锂离子电池认证、先进传感器以及潜艇和水面舰艇的发射和回收等领域具有创新性。
刀鱼无人水下航行器(Knifefish)
Knifefish 是一种鱼雷形机器人,长 22 英尺(6.7 m),直径 21 英寸(0.53 m),工作重量为 2,000 磅(910 kg)。它由锂离子电池供电,可以在预编程的搜索任务中运行长达 16 小时。它使用机载合成孔径声纳来探测浮动或埋藏的水雷,并且可以使用机载数据库和分析计算机识别各种各样的水雷和类似水雷的物体。然后,Knifefish 可以标记检测到的地雷并在其数据库中记录它们的位置;机器人随后将数据上传到其母潜艇,从而摧毁地雷。如果海军在机器人的海上试验之后认为这种能力是必要的,则可以修改 Knifefish 以实时传输其数据。每个母潜艇将能够操作两艘 Knifefish UUV,它们将扫描船舶附近的海床,并降低母潜艇自身遭受水雷损坏的风险。
Razorback中型潜航器
Razorback 是 Huntington Ingalls Industries (HII) REMUS 600 UUV 的潜射版本。它具有从干甲板避难所发射和回收的能力,干甲板避难所是一个可以集成在某些潜艇类型中的隔间。Razorback UUV 已针对潜艇使用和濒海战场空间传感进行了修改,可提供对海洋环境的静态和动态特性和特征的传感,以支持军事行动。
REMUS 600 UUV 系统部署在多种配置中。许多不同类型的传感器和有效载荷都是可能的,但大多数都是设计用于测量海底的。其他几个有效载荷正在开发中,以支持未来的任务计划和能力。该潜航器能够使用碱性电池作为其能源进行大约 24 小时的操作。随后的任务需要完全更换电池组。该系统可以从许多平台发射和回收,包括潜艇干甲板避难所和鱼雷发射管发射和回收。
Razorback 的鱼雷发射管发射和回收版本将通过独立于潜艇执行作战环境情报准备 (IPOE) 来扩展潜艇的舰载传感能力范围。Razorback 的模块化、可互换传感器包将允许未来进一步的任务增长。
MK 18 Mod 2“Kingfish”自主无人水下航行器
美国海军用来寻找水雷
濒海战场空间传感滑翔机 (LBS-G)
LBS-G 是一种长续航 UUV,由浮力变化及其机翼和尾翼转向推动。滑翔机收集海洋学数据,使用锂电池一次可以运行长达 30 天。
轻型机器人作战车辆(RCV-L)是由英国多国国防技术公司QinetiQ Group和美国军用车辆开发商Pratt Miller Defense联合开发的小型可扩展无人作战车辆,用于支持地面作战行动。
自主濒海连接器(ALC)
ROGUE Fires
ROGUE Fires 是一种无人驾驶地面车辆 (UGV),它利用 JLTV 的极端越野机动性和有效载荷能力以及 Oshkosh 先进的自动驾驶车辆技术来支持陆基反舰导弹 (GBASM) 操作。与 ROGUE Fires 相关的无人技术允许车辆在远程操作员或领导跟随者模式下运行,通过将战士完全从车辆中移除来保护他们免受威胁。
如有侵权请联系:admin#unsafe.sh