11月6日至9日,第20届国际计算机学会(Association for Computing Machinery,简称ACM)嵌入式网络感知系统大会(Conference on Embedded Networked Sensor Systems ,简称SenSys)在美国波士顿召开。清华大学软件学院何源副教授课题组和美团无人机团队合作论文“麦巢:辅助无人机精准降落的远距离即时声源定位技术”(MicNest:Long-Range Instant Acoustic Localization of Drones in Precise Landing)获得了大会最佳论文奖第二名(Best Paper Runner-Up)。
ACM嵌入式网络感知系统大会是ACM主办的物联网领域旗舰学术会议,自2003年开始已连续举办20届。本届大会共收到209篇论文投稿,其中52篇被接收发表,最终评选出1篇“最佳论文奖”(Best Paper)和1篇“最佳论文奖第二名”(Best Paper Runner Up)。
该论文研究动机来自美团公司正在打造的城市低空物流网络真实应用场景。高精度的定位追踪技术是保障配送服务无人机安全可靠精准起降的关键技术之一。研究提出了一种基于地面麦克风阵列进行远距离即时声源定位的方案,有效解决了复杂城市环境中信号衰减快、信噪比低、多普勒非线性失真等难题,对无人机的可定位高度达120m,定位相对误差0.5%。
背景
为了使无人机能够满足配送运营的要求,无人机飞控系统主要依赖RTK、视觉等信息实现对无人机的定位。但是在城市环境,尤其在接近地面的城市峡谷场景中,无人机附近的楼宇反射甚至会遮挡GPS卫星的信号,从而导致严重的多径效应或者是非视距的信号传播。
无人机配送的长期业务目标是实现全天时全天候配送,为了提升无人机定位的健壮性,论文提出了基于声波的定位方法。
2 整体框架
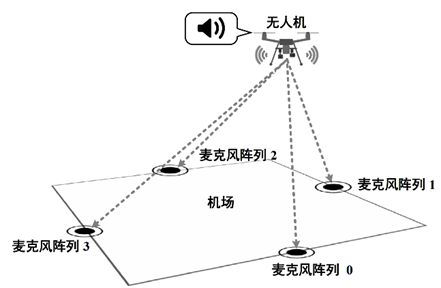
该论文提出一种新型的声学定位系统,以帮助无人机精确着陆。如下图1所示,无人机将装配一个普通的扬声器,从而使无人机能够发送辅助定位的声学脉冲信号。地面的机场将部署多个麦克风作为定位锚点。地面机场将从各个麦克风采集到的信号中检测声学脉冲,进而计算出脉冲信号的相对时延,定位无人机。

本论文需要解决如下三个技术难题:
- 第一个挑战是声学脉冲信号的信噪比非常低。有如下四个原因:(1)因为无人机穿梭于城市之间,所以扬声器的传输功率必须要被限制,以避免干扰城市居民。(2)本系统需要定位高空的无人机(>100m),声学脉冲信号将会承受很大的信号衰弱。(3)此外,许多城市的背景噪声本身就很强,约为 40-75 dB SPL。(4)在空中飞行时,无人机螺旋桨还会产生很大的声学干扰,可能高达104 dB SPL。
- 第二个挑战是无人机运动引起的多普勒信号失真。对于无线信号而言,多普勒效应的严重程度,正比于物体的运动速度,反比于无线信号的传播速度。相比于射频信号的传播速度(即光速),声学信号在空气中的传播速度是非常慢的。所以,声学信号将承受严重的多普勒失真。
- 第三个挑战是信号处理必须要高效。本定位系统用于引导运动的无人机降落,定位数据延迟不能过高,否则高延迟的定位结果将给飞控引入严重的系统不稳定性,威胁整个降落环节的安全。
总之,本提案要解决的核心技术问题是:如何在低信噪比的条件下,检测失真声学脉冲信号。

上图2展示了本提案的定位流程的示意图与对应的系统实现:无人机携带一个扬声器持续的播放声学脉冲信号。四个麦克风被部署在降落平台的四个角上以捕获声学脉冲信号。本系统通过定位音箱的位置来定位无人机。
3 具体方案
3.1 PRN调制与发送
在真实的场景中,无人机发送的声学信号需要满足如下要求:
- 声学对人耳友好:无人机发出的声音不能引起居民的听觉不适。
- 支持并发检测和识别:同一片空域总,可能会有多个无人机在起降,即多个无人机可能同时传输声学脉冲。这就要求本系统能够从冲突的声学信号中分别检测每个无人机的脉冲,并识别每个检测出的脉冲属于哪一个无人机。
- 安全:能够防止恶意攻击者伪造无人机的脉冲来误导系统。
为满足以上需求,本系统采用伪随机噪声(Pseudo-Random Noise, PRN)调制来生成无人机的声学脉冲。我们用每个无人机的识别码(ID)来设置伪随机种子,并生成一连串的N个高斯随机变量,作为该无人机发送的脉冲信号。具体实现中,码率等于扬声器的采样率,即48 kHz。
3.2 脉冲检测
将声波信号进行调试并发送后,我们需要在地面端进行脉冲检测。
我们选择的是匹配滤波器进行脉冲检测。其思想是以发射脉冲为模板,并将其与接收信号做相关。通过将接收信号流式地输入到匹配滤波器中,匹配滤波器就会流式地输出相关结果。如果从输出结果中找到一个明显的相关峰,我们就判定该脉冲被检测到了。但为了解决低信噪比问题,需要增加脉冲长度,但是多普勒失真的存在,使得增加脉冲长度只会适得其反。
解决此问题的直接有效方法就是补偿多普勒失真:多普勒效应缩放了脉冲码字的持续时间。 如果无人机相对于麦克风的径向速度已知,我们就可以计算出码字实际的持续时间,再用该参数重新采样原始的PRN脉冲模板,以生成一个与收到的脉冲码字同步的信号模板。可以预期的是,用该新模板来检测PRN脉冲的模板补偿了多普勒效应的干扰,进而可以按需地增加PRN脉冲长度,克服低信噪比问题。
然而实际上,麦克风的径向速度是未知的。因此,我们采用线性搜索的方式来遍历麦克风的径向速度。对于无人机可能速度的集合我们依次进行重采样和相关计算。当集合中所有的速度都完成以上的操作,我们就得到了对应的N个相关函数。从中,我们只需要保留有着最大相关值的一个相关函数。这是因为最大的相关值就意味着脉冲的多普勒失真已经被最大程度地补偿了,其对应的搜索速度也最接近真实的无人机的径向速度。
3.3 TDoA估计和定位
本系统共部署了四个麦克风,顺时针地分别记这些麦克风为为Mic0、Mic1、Mic2和Mic3。

对于每一路麦克风Mici的音源,我们依次进行上述的多普勒速度补偿与脉冲检测,并得到相关函数。从该相关函数中,找到其中相关峰,并把相关峰的位置当作脉冲信号到达Mici的到达时间(Time of Arrial, ToA)。方便起见,分别记脉冲信号到达4个麦克风Mic0、Mic1、Mic2和Mic3的到达时间为ToA0、ToA1、ToA2和ToA3。
接着,我们计算脉冲到达相对时延(Time Difference of Arrial, TDoA)。在本系统中,我们只计算对角麦克风对的TDoA,即麦克风对
两个TDoA将通过WiFi传输给无人机。基于这些信息,无人机可以建立两个双曲面方程组。根据双曲面方程组和无人机的高度信息,可以求得飞机剩下两个自由度的信息。
4 创新点
相比于视觉定位方案,本方案有如下优点:
- 因为声学信号的传播不受光照条件的影响,故本系统的工作不受光照条件的影响;
- 声学信号是向全空间辐射的,故本系统的水平定位范围更大;
- 理论上也支持多个无人机定位。
目前,该技术方案已经接入美团无人机的飞行控制系统,并通过了多种复杂环境的测试验证,未来计划在美团无人配送业务中落地应用。
蓬勃发展的无人机产业,为当前正蓄势爆发的即时零售新业态提供了更高效的配送解决方案。而前沿技术在现实场景中的落地应用,能够进一步促进技术的发展。据深圳市交通运输局数据,美团无人机已开通11条城市场景常态化试运行航线,完成超7万单真实订单,配送飞行总时长超1万小时,累计测试超40万架次。
美团无人机业务负责人毛一年表示:“综合来看,城市低空末端物流具有高效、稳定、高品质等特点,可以更好满足当前市场对即时物流行业发展的新需求,这也成为推动相关产业在近两年快速落地的主要原因。”
相关资料及说明
- MicNest:https://micnest.github.io/
- 论文由清华大学、美团公司及米兰理工大学的研究者共同完成,研究工作得到了清华大学-美团数字生活联合研究院和国家自然科学基金的支持。
如有侵权请联系:admin#unsafe.sh