每周文章分享2023.06.05-2023.06.11分享人: 河海大学——祝远波标题: A Novel Hybrid Particle Swarm Optimization Algorithm fo 2023-6-10 11:12:45 Author: 网络与安全实验室(查看原文) 阅读量:35 收藏
每周文章分享
2023.06.05-2023.06.11
分享人: 河海大学——祝远波
标题: A Novel Hybrid Particle Swarm Optimization Algorithm for Path Planning of UAVs
期刊: IEEE INTERNET OF THINGS JOURNAL, VOL. 9, NO. 22, 15 NOVEMBER 2022
作者: Zhenhua Yu, Zhijie Si, Xiaobo Li, Dan Wang, and Houbing Song.
分享人: 河海大学——祝远波
研究背景
无人驾驶飞行器(Unmanned Aerial Vehicles,UAVs)在各个领域都变得越来越重要,包括侦察、救援和军事行动等。尽管有各种优化算法可用于无人机路径规划,但它们在处理复杂的三维环境的能力方面仍有局限。为了解决这个问题,本文提出了一种新型的混合粒子群优化算法--模拟维度PSO(SDPSO),它结合了模拟退火来更新全局最优解,以及维度学习策略来减少粒子退化,避免局部最优解,并增强算法的搜索能力。SDPSO算法的表现优于其他算法,包括GA、差分进化、GWO、ACO和SA,它在更短的时间内为无人机提供了一条满足其约束条件的最佳路径。可以有效地解决复杂三维环境中无人机的路径规划问题,提高其整体效率和自主性。
关键技术
在本文中,提出了一种新的路径规划算法SDPSO算法框架,它的优化策略包括模拟退火算法和维度学习策略。模拟退火算法用于改进全局最优解的更新策略,利用随机梯度下降方法逼近全局最优解。维度学习策略被应用于减少粒子群的振荡,提高收敛速度。基于维度学习策略,每个粒子会选择合适的维度来集中对最优解的搜索,避免在搜索过程中偏离更优的位置。这两种优化方法提高了粒子下降速度,避免局部最优解,增强搜索能力,适用于处理UAVs在复杂三维环境中的路径规划问题。
该方法的创新和贡献如下:
1.提出了一种新的SDPSO算法来解决无人机3-D路径规划问题;
2.在SDPSO算法中,每个粒子都集成了全局最优解的有用信息,减少了粒子在进化过程中的退化现象,提高了收敛速度。全局最优解的迭代更新过程与SA算法相结合,增加了粒子的搜索能力,提高了SDPSO算法的性能。
算法介绍
1. 路径规划模型
1. 地形和威胁建模
图1
无人机的路径规划是在解空间中寻找最优或次优解,图1是一组避免山脉和各种威胁的无人机飞行路径。解空间可以表示为
山峰、雷达或其他危险区域被认为是无人机无法通行的区域。将这些严重影响无人机飞行安全的区域称为障碍区域。障碍物信息对于无人机的路径规划至关重要,它直接决定了路径规划的质量,可以通过通信设备和机载传感器进行实时预加载或更新。
障碍物的数学模型定义为:
道路穿越危险区域的成本函数f_1显示如下:
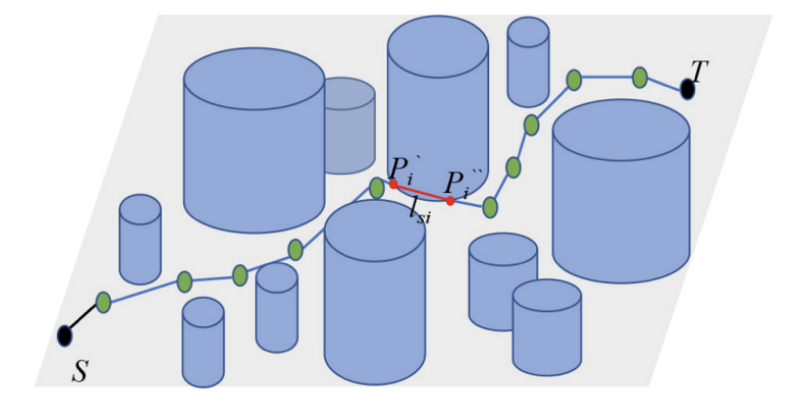
如图2所示,其中l_si为危险区域路径的长度,dash_punk为通过危险区域路径的长度惩罚系数。
图2
与路径长度相关联的成本函数f_2如下所示:
2. 无人机飞行特性的约束建模
图3
如图3所示,一个有效的路径不仅要避免山脉和各种威胁,而且要满足无人机的物理约束,如偏航角α_i和俯仰角β_i。
综合偏航角α_i和俯仰角β_i,成本函数f_3显示如下:
当无人机的路径高度接近地面高度时,无人机撞击地面的风险增加。当路径高度过高时,无人机在特殊任务中很容易被敌方雷达探测到,并且无法达到最小化飞行路径的原始目的。无人机的路径预计将在一个合适的高度。与路径高度相关的成本函数f_4如下所示:
3. 适应度函数建模
路径的质量经常通过适应度函数来评估。考虑到路径长度、路径高度、无人机飞行特性以及与路径质量相关的安全约束,可以定义一个评估路径质量的适应度函数为
2. SDPSO算法
1)粒子初始化
图4 粒子结构
在利用SDPSO算法求解无人机的路径规划问题时,求解空间由每个可行路径组成,粒子维数D为确定每条路径的中间节点数。给定粒子维数D和当前迭代次数t,第i个粒子的位置为x_t-i和速度v_t-i。个体的历史最优位置和全局最优解可以分别表示为p_t-i和g_t-i。
2)全局最优解的更新策略:作为一个贪婪的算法,SA算法的核心思想是比较概率p,接受p较大的方案,以避免陷入一个局部最优解。伪代码如下所示:
参数p表示次优解被接受的概率。当p过大时,算法的收敛性较差;当p过小时,算法效率不高,容易陷入局部最优解。
其中,T为当前系统的温度。如果T太大,则会导致概率p趋于1,这意味着该算法将接受具有更高概率的次优解。在算法迭代的后期阶段,如果概率p太大,则该算法将难以收敛。用T_t+1 = r×T_t,r更新T是控制[0,1]中温度变化速率的参数。
其中,K为最大迭代次数,t为当前迭代次数。如果r太大,使用该算法找到全局最优解的概率就会更大。但这将是一个非常耗时的过程。相反,如果r太小,搜索过程将会更快,但它可能会陷入局部收敛。因此,r采用随种群迭代线性递减的方法进行更新。
3)SDPSO的加速收敛:在SDPSO中引入了SA算法来更新全局最优解gt,从而使总体中每个粒子的振荡可能更加严重。这种现象降低了它的收敛速度。为了克服这一缺点,本文采用了DLS方法。如算法3所示,记录每个粒子的连续非更新数计数,当计数超过某个阈值m时,将根据全局最优解gt更新当前粒子在每个维中的位置x_t_i。伪代码如下所示:
其中,m如下式所示:
其中,M_max和M_min分别表示上界和下界。当m太大时,算法收敛速度太快,但种群多样性下降。搜索空间多样性的减少导致局部最优解。如果m太小,则该算法可能无法有效地工作。
3. 无人机路径规划的SDPSO算法:SDPSO算法将全局最优解gt的更新与SA算法相结合,增强了解空间的多样性,使其跳过局部最优解,提高了搜索全局最优解的能力。此外,还嵌入了DLS来克服粒子在演化过程中的振荡。根据DLS,每个粒子按维数集成了全局最优解维数的有益信息,减少了粒子在演化过程中的退化,提高了算法的收敛速度。伪代码如下所示:
实验结果分析
1. 仿真参数设置
表1展示了算法参数设置;
表2展示了模型参数设置;
图5展示了简单山地模型;
图6展示了复杂山地模型。
表1
表2
图5
图6
2. 简单环境中算法对比结果
图7 不同算法的无人机路径规划
图7中有6条路径,对应于六种不同的相同环境约束下的无人机路径规划算法。虽然六种路径远离地形障碍,但很明显,六种算法的路径规划结果是不同的。由PSO算法得到的路径是最差的。该路径有轻微的振荡,导致路径不稳定,并增加了这个路径的长度。这不利于无人机任务的实施。由SDPSO算法得到的路径最平滑,质量最好。
图8 适应度值随着迭代的变化
图8显示了6个算法的收敛曲线。与其他算法相比,SDPSO算法得到的适应度函数的值明显最小,其次是TSLPSO、DGBCO、GWO和RPSO。由PSO算法得到的适应度函数的值最高。换句话说,SDPSO算法得到的路径更好,而PSO、RPSO、GWO、DGBCO和TSLPSO规划的轨迹被困在局部最优解中。另一方面,SDPSO算法的收敛速度最快,当迭代次数约为120时,可以得到最优解,远远优于其他算法。
表3 重复100次后的适应度值比较
在相同的条件下,实验重复了100次。从表3可以看出,SDPSO算法得到的适应度函数的值最小,其次是TSLPSO、DGBCO、RPSO和GWO。由PSO算法得到的适应度函数的值最高。与PSO、DGBCO、GWO、TSLPSO和RPSO相比,SDPSO算法的最优、最差和平均值最小。以上结果表明,SDPSO具有更好的全局优化能力。
3. 复杂环境中算法对比结果
图9 不同算法的无人机路径规划
图10 适应度值随着迭代的变化
表4 重复100次后的适应度值比较
复杂环境中不同算法的对比结果如上图表所示。SDPSO在最佳值、最差、平均数和性病方面都有最好的性能。此外,SDPSO的均值最低,说明SDPSO算法的收敛速度最快。显然,当飞行环境更加复杂时,收敛速度和SDPSO算法的全局优化能力仍然很好。
基于以上实验结果,当使用SA算法更新全局最优解时,它可以帮助SDPSO算法增加搜索空间的多样性,使其跳过局部最优解。每个粒子集成了全局最优解的有用信息,减少了粒子在演化过程中的退化,提高了算法的收敛速度。与其他算法相比,SDPSO算法具有更好的全局优化能力和更快的搜索速度。
总结
本文解决了三维复杂空间中无人机的路径规划问题。本文提出了一种新的SDPSO算法,该算法将全局最优解gt的迭代更新过程与SA算法相结合,提高了种群多样性,避免了陷入局部最优解,提高了SDPSO算法的搜索能力。同时,每个粒子都集成了关于全局最优解gt的有用信息,从而减少了粒子在演化过程中的退化,提高了SDPSO算法的收敛速度。
==河海大学网络与安全实验室==
微信搜索:Hohai_Network
联系QQ:1084561742
责任编辑:何宇
如有侵权请联系:admin#unsafe.sh