

官方公众号企业安全新浪微博

FreeBuf.COM网络安全行业门户,每日发布专业的安全资讯、技术剖析。

FreeBuf+小程序

造车新势力在智能驾驶上使出了浑身解数,谁都想成为真正的“智驾车”,只为赢得更多客户的瞩目。目前,超过十家车企宣称具备城市 NOA(Navigate on Autopilot)能力,这份名单包括小鹏、蔚来、理想、小米、极狐等品牌。
NOA 即自动辅助导航驾驶,而特斯拉是全球第一家在量产车中推出 NOA 功能的厂商,车载FSD(Full Self-Driving)系统中集成了 NOA,这可以说是特斯拉的核心武器。
只要设定目的地,汽车就可以在 NOA 的支持下自动行驶到达,这显然是极具前景的出行方式。但实现城市 NOA 就要在路况复杂的街道上行驶,随时会有突发状况,汽车对环境的感知能力就尤其重要。国内大多数车企都选择了搭载激光雷达,因为它的优点是精度高、分辨率高,在各种光照条件下都能工作,探测距离长,可靠性也高。将设备与当前的 AI 技术相结合,就成为“智驾车”的关键基础设施。
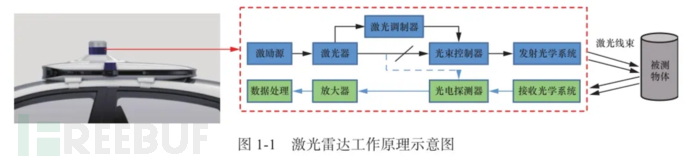
激光雷达是“光探测和测距”(Light Detection and Ranging,LiDAR)的简称。其工作原理类似于我们使用手电筒,激光雷达发射出一束激光光束,然后测量这束光在与物体相交时的反射情况,从而确定物体的位置、距离和形状。
激光雷达的具体工作过程,首先是以激光作为信号源,由激光器发射出脉冲激光,打到地面、树木、车辆、道路、桥梁和建筑物等被测物体表面上;随后激光会发生散射,一部分光波会被反射到激光雷达的接收器上;再根据激光测距原理,即可得到从激光雷达到目标点的距离信息。
再进一步,通过激光器不断地水平旋转,便可以得到车辆周围目标物上全部激光点的数据,再用此数据进行成像处理后,便可得到周围环境精确的三维立体点云。激光雷达常见参数“128线”,即指该激光雷达的水平分辨率,它在水平方向上发射和接收激光束的数量或密度。较高的线数通常意味着更高的水平分辨率,可以提供更详细的环境感知。
而“点云”是指由激光雷达获取的数据,它是一组三维空间中的点的集合,每个点代表激光雷达扫描到的一个物体表面或障碍物。点云数据可以用来构建环境地图、检测障碍物、定位车辆或机器人等。激光雷达就是这样“看见”世界的,然后通过算法处理数据,从而实现智能驾驶。
中国新车企的蓬勃发展,使得行业对激光雷达算法工程师求贤若渴,但目前市面上还缺少系统化介绍车载激光雷达相关应用的图书,《智能驾驶之激光雷达 关键算法详解》出现填补了市场的空白。

书籍详情
《智能驾驶之激光雷达关键算法详解》涵盖标定、感知、定位三个大类共十余个研究方向,涉及算法约 300 个,详解主流算法超 30 个,一次性透彻讲解激光雷达的核心算法。
本书的写作特点是,首先从问题定义、研究背景和主流研究方向等角度出发,帮助读者快速勾勒出该领域的研究现状;然后,针对每个方向精选有代表性的算法进行详细剖析。这使得读者可以将理论与现实问题相结合,既理解了算法的本质,也能在工作中学以致用。
书中包含较多的理论知识,作者为此精心绘制了 200 多幅图示,严谨详细推导了 400 多个公式,以直观形象的图解和理论推导帮助读者深刻理解算法。
 精彩书摘
精彩书摘
另外,书中所介绍的关键算法大多数均有开源代码,其对应的 GitHub 开源链接在文中已经分别列出。这是读者学习的又一宝贵资源。
高等院校车辆工程、机器人工程、交通工程专业和自动驾驶专业的在校学生,可以直接将此书作为教材使用。智能驾驶或机器人领域的技术爱好者,以及激光雷达标定、感知、定位算法工程师,都可以从本书中学习到专业知识,并作为工作参考。
赠书活动规则
本次活动将免费送出 5 本赠书,请添加 FreeBuf 客服小蜜蜂微信号“freebee2022”,加入 FreeBuf 官方社群,参与抽奖互动。FB 客服将选取 5 位中将用户赠送本书。
注意:
1. 活动结束后,中奖名单将在社群直接通知,中奖的小伙伴要注意查收信息,提供寄送地址和信息;
2. 《智能驾驶之激光雷达 关键算法详解》赠书活动结束,会尽快发货;
3. 抽奖活动于 6 月 13 日下午 2:00 在 FreeBuf 各社区同步进行;
4. 赠书活动最终解释权归 FreeBuf 平台所有。
作者简介
揭皓翔:博士毕业于华中科技大学,现任知名大厂智驾高级算法专家、技术负责人,拥有近十年的行业积淀。他的研究方向包括智驾感知、融合、SLAM、规控等,发表 SCI、CCF 会议等论文 10 余篇,并负责及参与多款量产车型 ADAS 项目交付工作,对智能驾驶的技术发展趋势有着深入见解。
专家推荐


本文为 独立观点,未经允许不得转载,授权请联系FreeBuf客服小蜜蜂,微信:freebee2022